Create Your First Project
Start adding your projects to your portfolio. Click on "Manage Projects" to get started


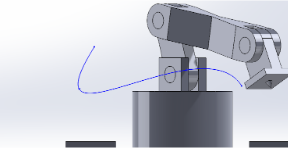
Robotic Arm Motion & Kinematic Analysis
Project Type
Engineering
Date
April 2025
This project focused on motion simulation and kinematic evaluation of a robotic arm following a predefined path. The robotic arm was assembled in SolidWorks using fully constrained mechanical mates to ensure realistic articulation and joint behavior. A custom open path was designed within the arm’s reachable workspace and applied using a path mate.
A motion study was performed with a constant motor speed applied along the path, allowing the arm’s movement to be analyzed over time. Linear displacement, velocity, and acceleration were recorded in both the X and Y directions. The resulting plots revealed how changes in path geometry directly influenced kinematic behavior, including sharp variations in velocity and acceleration near path transitions.
The analysis demonstrated that sudden changes in direction lead to spikes in acceleration, which can increase mechanical stress and reduce system efficiency. This reinforced the importance of smooth trajectory planning in robotic and automated systems, particularly in industrial environments such as manufacturing lines and material handling systems.
This project illustrates practical applications of motion analysis in robotics, automation, and mechatronics, with direct relevance to efficiency optimization and mechanical reliability.